The Indian Space Research Organisation (ISRO) recently launched its second mission for lunar exploration, the Chandrayaan 2. Chandrayaan is a Sanskrit word meaning moon-craft. After the successful mission of Chandrayaan 1 in 2008, this mission carries with it around 2 tonnes of payload with alongside myriads of expectations to the unexplored South Pole region of the Moon. ISRO has always been known its low-budget but first-attempt successful missions like the Mangalyaan or Chandrayaan 1.

History Of The Mission!
The mission initiated on the 12th of November 2007 as representatives of Russian Federal Space Agency, Roscosmos and ISRO signed an agreement stating the collaboration of both agencies on the Chandrayaan 2 project. According to the deal, ISRO had the prime responsibility of the orbiter and the rover while Roscosmos would provide the lander. The Indian government, chaired by Prime Minister Manmohan Singh, approved the mission on 18 September 2008. The design was ready by August 2009 and was undergoing a joint review by scientists of both nations.
ISRO finalized the payload as per schedule but the mission was postponed to 2013 and then 2016 because Russia was not able to develop the lander in time. Roscosmos later withdrew in wake of the failure of the Fobos-Grunt mission to Mars. Russia then cited its inability to provide the lander even by 2015. India decided to make the lander by itself making this mission a fully Indian mission without support from any other country.
The Journey!

The Chandrayaan 2 module has started it’s a journey on a Geosynchronous Launch Vehicle Mark III (GSLV Mk III) from Satish Dhawan Space Centre on Sriharikota Island on 22nd July 2019 at 09:13 UTC (14:43 IST). Initially scheduled on 14 July 2019, the launch was postponed due to some technical problems. By the time of writing this article, the Chandrayaan 2 module has completed its 2nd orbit around the Earth.
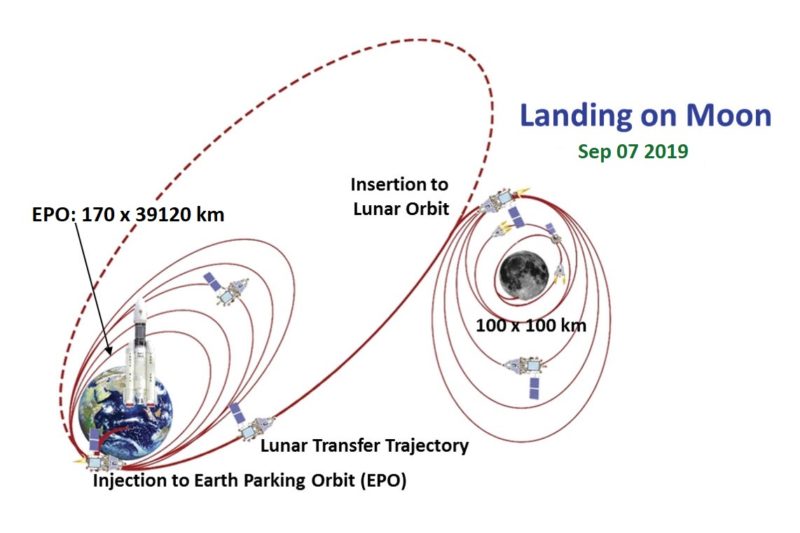
The craft will initially revolve around the Earth while slowly increasing its orbit. And it will then enter the ‘Earth to Moon Transfer Orbit’ (also referred to as Lunar Transfer Trajectory). This orbit will end as the module will get captured in Moon’s orbit (expectedly on 14 August) and will start revolving around it. It will then reduce its orbit to near the lunar surface. Once the required orbit is achieved, the Vikram Lander will detach itself from the orbiter and move further towards the lunar surface by decreasing its orbit. Before landing on the surface, it will perform necessary checks on the landing site and then safely “soft-land” on the lunar surface using its rebooting engines. The expected landing date is 7 September. After landing, the Pragyan rover come will come out from the lander and will initiate its lunar exploration.

Objectives!
According to ISRO, Chandrayaan 1 was one of the first to discover traces of water on the lunar surface. With Chandrayaan 2, ISRO aims to demonstrate the ability to soft-land and operate their rover on the lunar surface. The scientific goals of the mission include studies of lunar topography, mineralogy, elemental abundance, the lunar exosphere, and signatures of hydroxyl and water ice. The orbiter, which will be used for communication with the rover, will map lunar surface and help in making 3D maps of the same. Chandrayaan 2 will also find the location and abundance of water on the Moon.
Design
The main payload of the launch vehicle is divided into three main components important for the mission – the orbiter, the lander (named Vikram), and the rover (named Pragyan).
The Orbiter
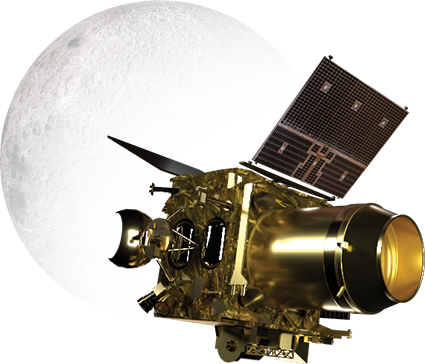
The orbiter, structured by Hindustan Aeronautics Limited (HAL), will be orbiting the Moon at an altitude of 100km. Weighing around 2379 kg, it will able to generate electrical power of 1000W. It is equipped with five instruments out of which three are new while two are improved versions of those flown on the Chandrayaan 1. The Orbiter High-Resolution Camera or ORHC present on the orbiter will conduct high-resolution observations of the landing site prior to the separation of the lander from the orbiter. The mission life of the orbiter will be a year in the lunar orbit.

The Lander
What is the Chandrayaan 2 Lander Name?
Vikram Lander
As the orbiter is in the lunar orbit, the lander named Vikram Lander will detach from the orbiter to descend to a smaller lunar orbit of 30km ×100km using its 800N liquid main engines. The lander is named Vikram is after Vikram Sarabhai who is known as the father of the Indian space program. Once Vikram is in the desired orbit, it will perform a comprehensive check of all its on-board systems along with scanning the landing site before soft-landing on the lunar surface.
After Vikram has landed on the landing site which is SLS54 (70.90267°S 22.78110°E) or alternatively on ALS01 (67.87406°S 18.46947°W) on the southern region of the Moon, it will deploy the rover and then perform scientific activities for the next 14 days. Vikram is equipped with a high-resolution camera, Lander Hazard Detection Avoidance Camera (LHDAC), Lander Position Detection Camera (LPDC), an 800N throttle-able liquid main engine, attitude thrusters, Ka-band radio altimeter (KaRA), Laser Inertial Reference & Accelerometer Package (LIRAP), and the software needed to run these components. All these equipment are domestically built in the Space Applications Center (SAC), Ahmedabad.

Testing of the lander was done in Challakere in the Chitradurga district of Karnataka, where roughly 10 craters were built on the surface to help assess the ability of the lander’s sensors to select a landing site.
The Rover
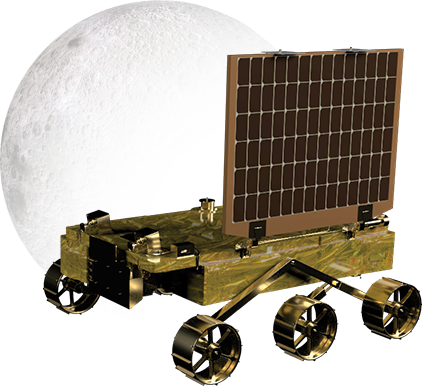
The rover is named Pragyan, which is Sanskrit word meaning wisdom. With a mass of about 27kg, the solar-powered rover will be able to make electrical energy of around 50W. It will cover a distance of around 500 m on the lunar surface with a speed of 1 cm per second while performing on-site chemical analysis and sending data to the lander which will relay it to the Earth station. The life expectancy of the rover is around 1 lunar day equivalent to 14 Earth days. Its electronics are not expected to endure the frigid lunar night. However, its power system has a solar-powered sleep/wake-up cycle implemented, which may result in longer than expected service.
It has two one-megapixel monochromatic NAVCAMs (NAVigation CAMeras) in the front which will provide a 3D view of the surrounding terrain. IIT Kanpur has contributed in the light-based maps generation and motion planning for the rover.


